Role: Principal Investigator (Thesis Research)
Timeline: Aug 2023 – Dec 2024
Team: Faculty Advisor (Dr. Laura Ikuma), Thesis Committee (Dr. Isabelina Nahmens, Dr. Corina Barbalata)
Tools & Methods: Universal Robots (UR5e), PolyScopeX, Python (Data Scripting), R (Statistical Analysis), True Experimental Design, A/B Testing, Physiological Monitoring (Heart Rate), NASA-TLX, Trust in Automation (TiA) Scale
Executive Summary:
Challenge: Industry 4.0 is introducing “Cobots” (Collaborative Robots) to shared workspaces to reduce physical strain on workers. However, a lack of human factors consideration can lead to low adoption rates and operator frustration. We needed to understand: Does higher automation actually lead to a better user experience?
Approach: I designed a controlled laboratory experiment with 58 participants to compare two interaction modes: Semi-Automated (Human-in-the-loop) vs. Fully Automated (Machine-paced). I utilized physiological sensors (HR monitor, ) and standardized psychometric scales (Trust in Automation (TiA) questionnaire, NASA Task Load Index Scale) to measure the invisible “cognitive costs” of collaboration.
Outcome: The data revealed a critical trade-off: While Fully Automated modes were 22.3% faster , they caused cognitive disengagement and lower trust. Semi-Automated modes, while slower, resulted in significantly higher user trust and better cognitive engagement. The study recommends balancing automation with user control to optimize performance.
Context: From “Pain” to “Protocol”
Inspiration: This research was inspired by real-world observation. While visiting Setex Inc. (an automotive manufacturer), I observed a car seat upholsterer using a pneumatic gun repetitively, which she noted caused chronic wrist pain. While robots could help, there was a clear separation between human tasks and robot tasks, sparking my interest in how to merge them effectively.
Research Question: How do we design robot behaviors that reduce physical load without increasing mental load or eroding trust?
Experimental Design (Mixed-Methods)
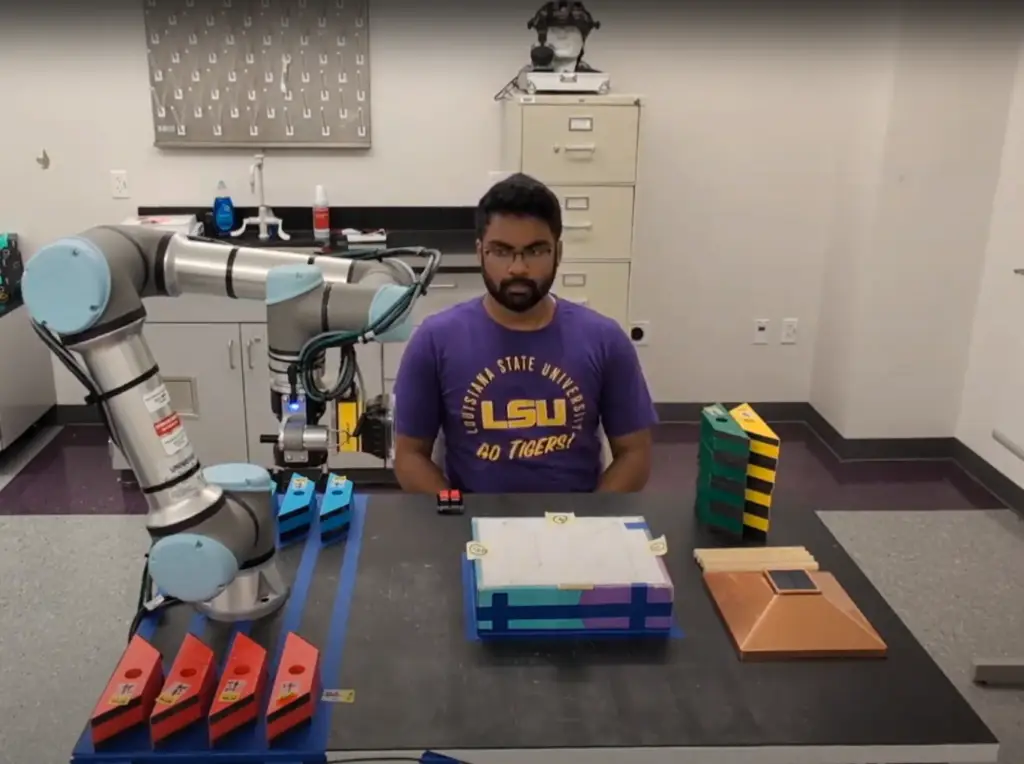
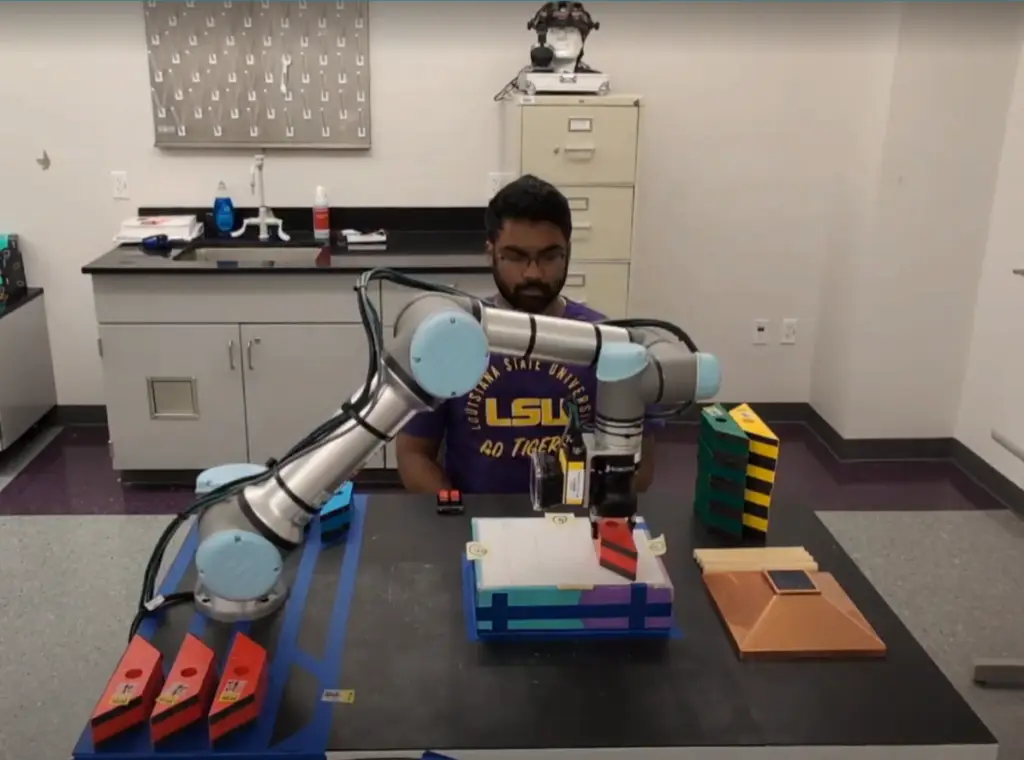
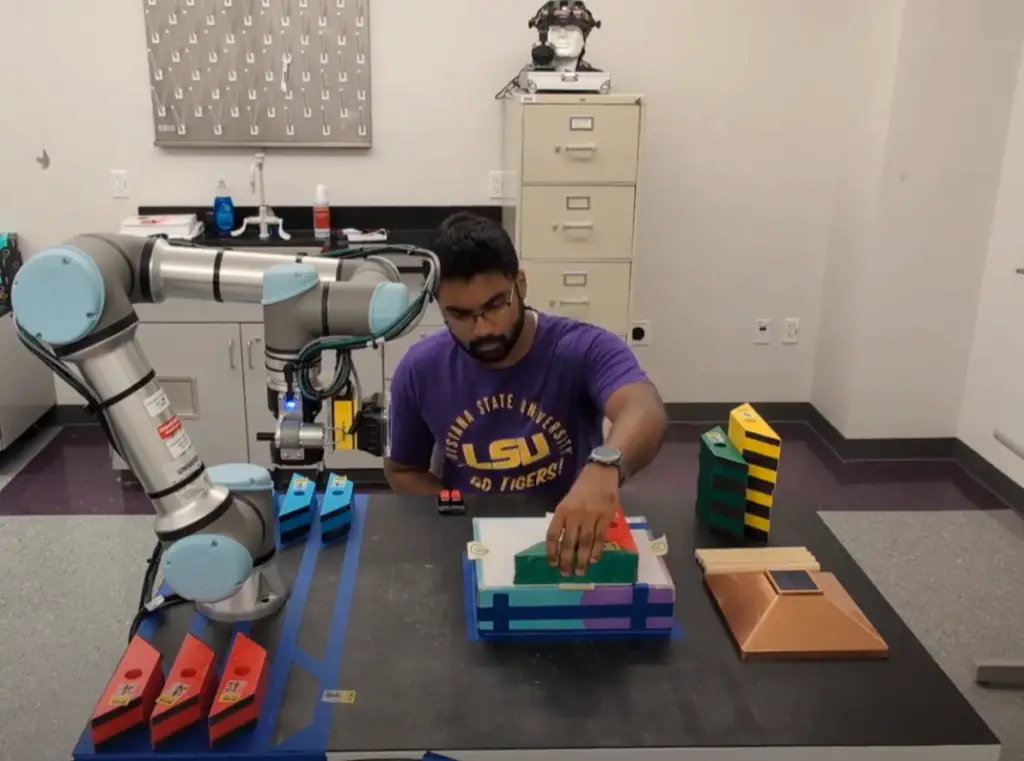
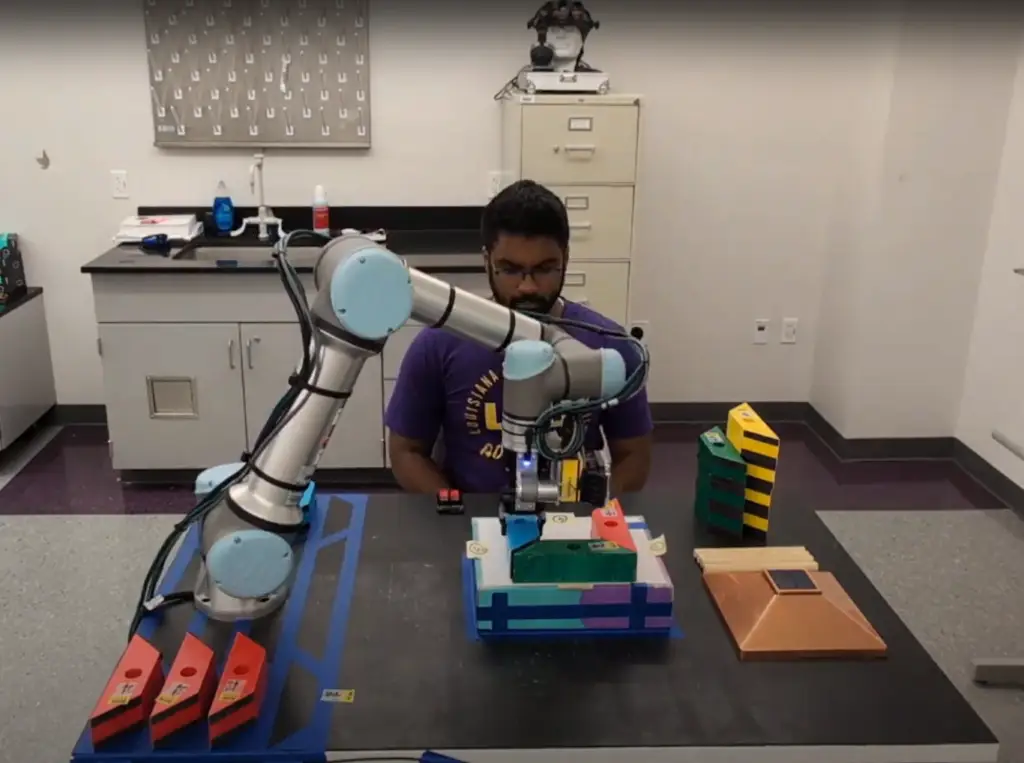
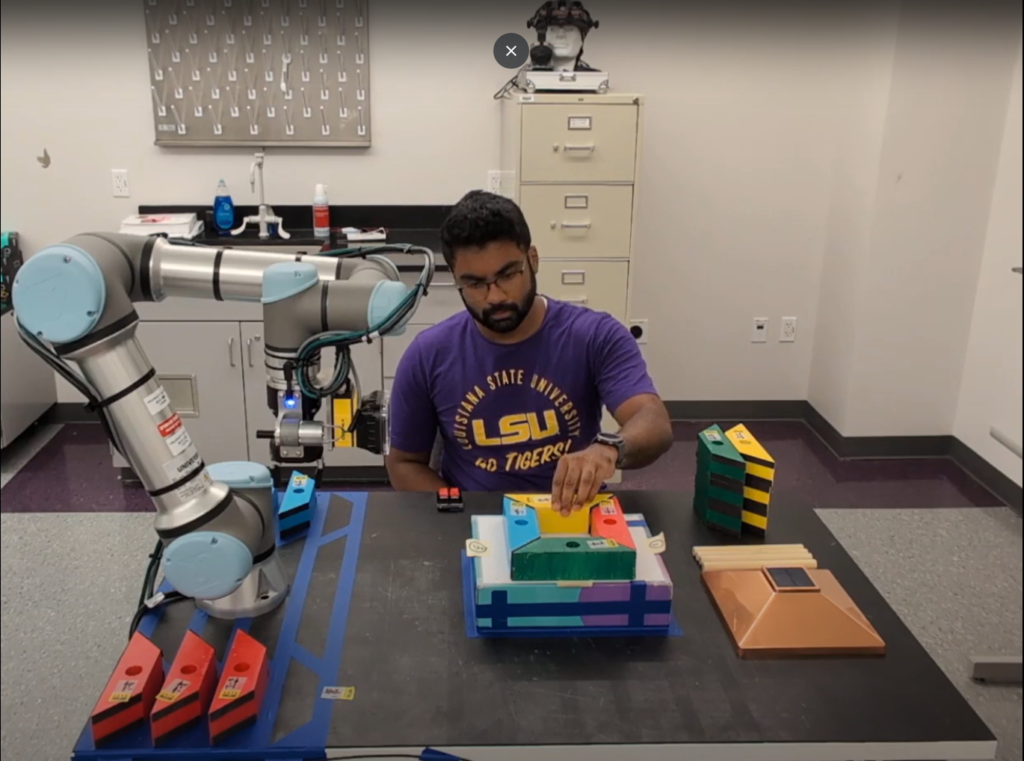
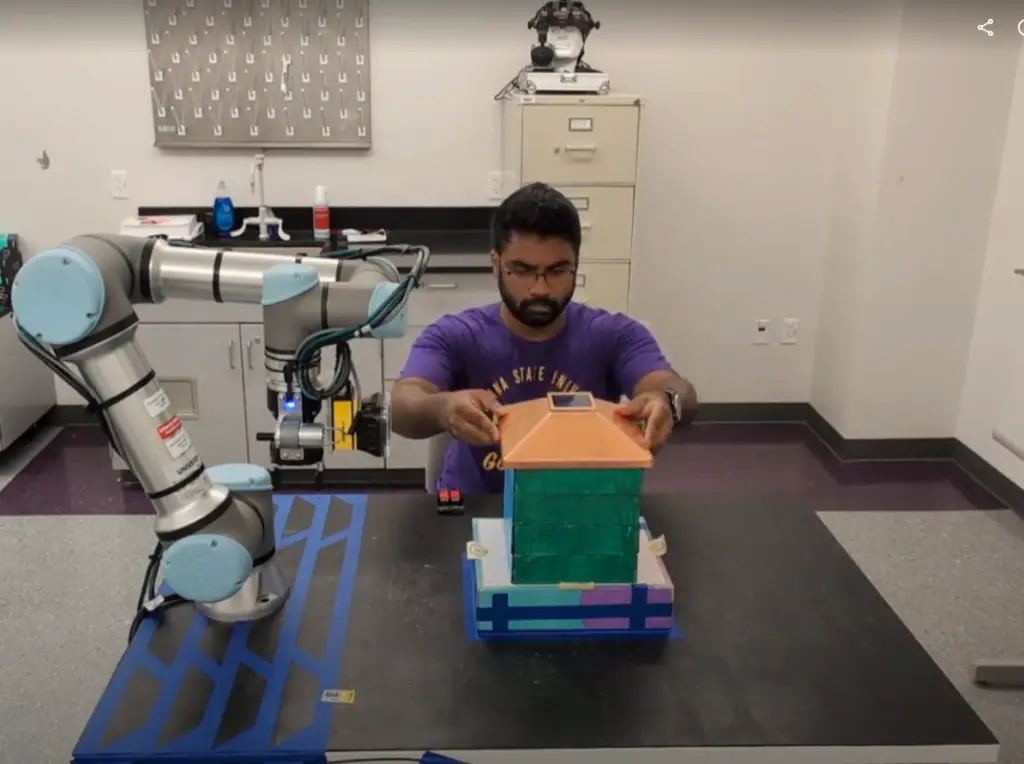
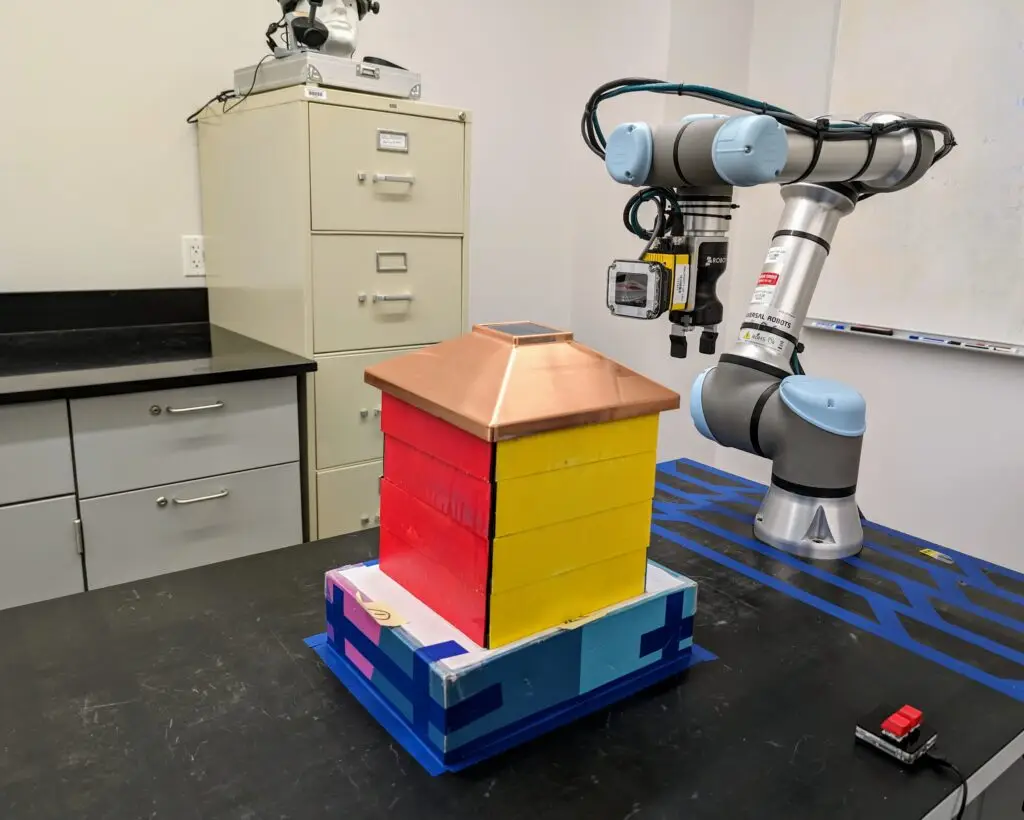
Task: Participants collaborated with a Universal UR5e Robotic Arm to assemble a miniature lamp post using color-coded blocks.

The Variables:
- Group A (Semi-Automated): The user controlled the pace. The robot waited for a signal from the user to initiate its task.
- Group B (Fully Automated): The robot moved on a fixed timer, forcing the user to adapt to the machine’s pace.
The Metrics (Triangulated Data):
- Physiological: Heart Rate Variability (HRV) to measure real-time stress.
- Performance: Detection Response Time (DRT) to measure cognitive “spare capacity” (attention).
- Subjective: NASA-TLX (Workload) and Trust in Automation (TiA) surveys.
Key Insights & Data Analysis
Used R to perform T-tests and correlation analysis, I uncovered three major findings:
Automation isn’t always “better.”
- Data: The Fully Automated group was 22.3% faster in assembly time (p<0.0001).
- Catch: However, the Trust in Automation subscale showed significantly higher ratings in the Semi-Automated group (p=0.0067).
- UX Takeaway: Speed is a business metric; Trust is a user metric. Forcing speed without control kills trust.
The “Cognitive Disengagement” Danger
- Data: In the Automated group, we found a positive correlation between Heart Rate and Detection Response Time (r =0.29, p =0.05), meaning higher arousal led to slower reaction times.
- Insight: When users had no control (Fully Auto), they experienced “cognitive disengagement.”23. Because the robot moved on its own, users “zoned out” or became overloaded, making them less responsive to auditory alerts.
- UX Takeaway: Keeping the human “in the loop” (Semi-Auto) maintains situational awareness24.
Control Drivers Satisfaction
- Data: Overall Trust ratings were 4.6% higher in the Semi-Automated mode.
- The Insight: Users prefer agency. Being able to signal the robot (the “Go” button) made the system feel like a partner, whereas the automated timer made it feel like a taskmaster.
Design Recommendations
Based on this data, I developed specific guidelines for Human-Robot Interface (HRI) design:
- Prioritize Agency over Speed: In complex or high-risk environments, sacrificing pure speed for user control (Semi-Automation) fosters higher trust and better long-term engagement
- Implement Adaptive Control: Systems should not be binary (Manual vs. Auto). They should offer adaptive control options allowing users to adjust automation levels based on task complexity.
- Transparent Feedback Loops: Fully automated systems need transparent feedback to prevent the “disengagement” we observed, ensuring users remain aware of the system’s intent.
Impact:
- Academic Contribution: Published a comprehensive thesis contributing to the body of knowledge on Ergonomics and Industrial Engineering.
- Methodological Framework: Validated a dual-task methodology (Assembly + DRT) for measuring cognitive load in physical workspaces, a novel approach for this specific type of collaborative task.
- Future Application: These findings provide a data-backed foundation for designing safer “Cobot” workflows in manufacturing and healthcare sectors.